Academic Project
Control Systems
Control Systems
Maze Solving Robot
Overview
Designed and built a maze-solving robot capable of autonomously mapping and navigating unknown maze configurations.
The Challenge
The robot needed to navigate accurately without external sensors like GPS, relying solely on local wall detection and odometry.
The Solution
Implemented a flood-fill algorithm for maze mapping and path optimization. Tuned PID controllers for precise straight-line motion and turns.
Key Results
- Successfully solved 16x16 mazes autonomously
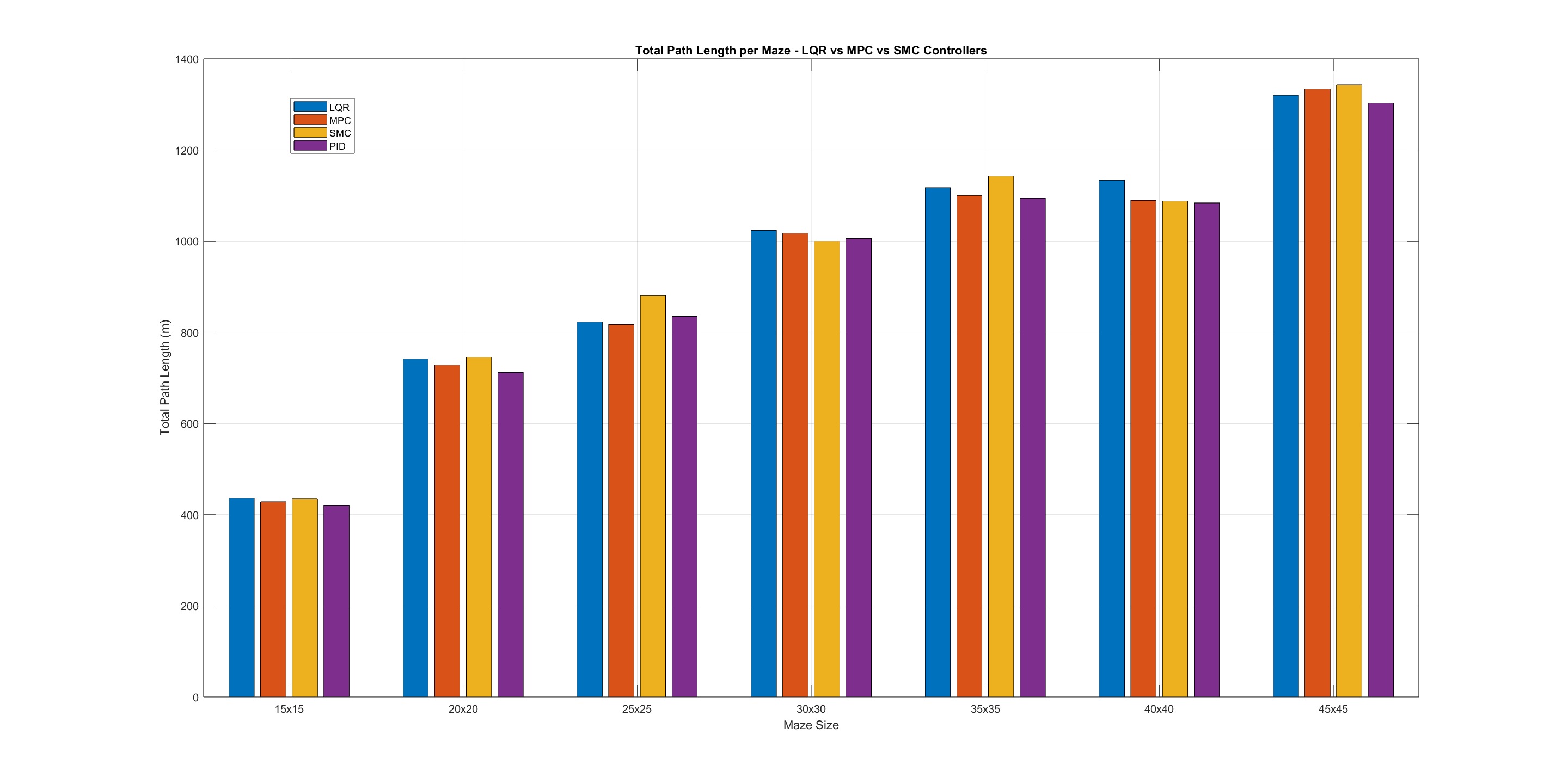
- Optimized total path length per maze
- Reduced total traversal time significantly
- Demonstrated robust control logic