Hi, I'm Shriman
I build autonomous mobile robots for manufacturing. At Tesla, I deployed AMR systems projected to save $2.04M/year. Now seeking full-time roles where I can take robotics from prototype to production floor.

Who I Am
Turning Complex Robotics Challenges Into Production-Ready Solutions
A robotics engineer at the intersection of AI, autonomous systems, and manufacturing — here's where my worlds collide.
My Story
Robotics engineer who deployed autonomous forklifts at Tesla projected to save $2.04M annually. I specialize in taking AMR systems from prototype to production — integrating SLAM, LiDAR perception, and path planning into manufacturing environments where robots work alongside people.
Currently pursuing my Master's in Robotics at Northeastern University, Boston. With hands-on experience deploying AMR systems at Tesla and Hero MotoCorp, I bridge the gap between cutting-edge robotics research and real-world industrial applications.
I'm passionate about building robots that deliver measurable impact on the factory floor — from 83% reductions in routing complexity to tripling material handling throughput.
Education
Master of Science in Robotics
Northeastern University
2024 – 2026
GPA: 3.78 | Relevant: Robot Sensing & Navigation, Mobile Robotics, Deep Learning for Robotics
Bachelor of Technology in Mechatronics Engineering
SRM Institute of Science & Technology
June 2018 – May 2022
GPA: 3.81 | Relevant: Fundamentals of Robotics, Linear & Digital Control Systems, Computer Vision
Beyond Engineering
Personal Interests
Formula 1 Racing
MotorsportPassionate about the engineering excellence behind F1 cars and the strategic depth of race management.
Playing Mridangam
Music & CultureTrained in Carnatic classical percussion, exploring the mathematical precision of rhythm patterns.
3D Printing
FabricationCreating functional prototypes and custom parts for robotics projects using FDM and resin printing.
My Journey
Where I've Built Autonomous Systems
Manufacturing Equipment Engineer Intern
Tesla Inc.
- Driving deployment of autonomous forklift AMRs using SLAM, LiDAR, and 3D pallet vision, projected to deliver $2.04M in cost savings
- Programmed AMR path planning using penalty-optimized Theta* algorithm, reducing routing complexity by 83%
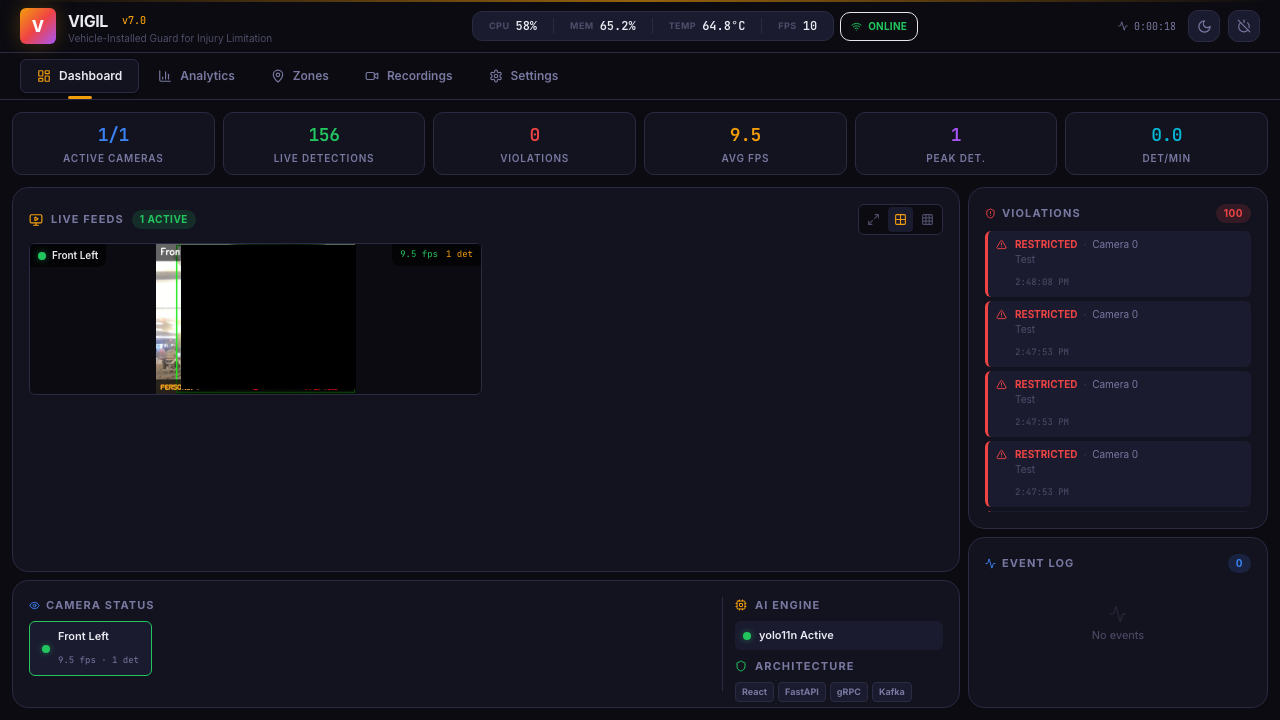
- Built VIGIL — an AI-powered pedestrian safety system for forklifts with 7 swappable YOLO/RT-DETR models, React dashboard, gRPC streaming, and Kafka event pipelines
- Developed RAG-based AI LLM agent for machine documentation, reducing diagnostic response time by 17%
- Engineering DFMEA enhancements for AGV operations targeting 35% downtime reduction
Assistant Manager - Robotics Engineer
Hero MotoCorp Limited
- As a Robotics Engineer at Hero Motorsport's EV plant in the south of India, optimized production throughput through implementation of Automation and Robotics in the manufacturing plant
- Delivered 67% reduction in pallet unloading time by engineering zero-height pallet lifters
- Tripled pallet handling throughput by eliminating forklift operations on factory floor
- Achieved 32% increase in JIT material loading efficiency through RRT-based AMR path planning
Production Engineer
Hero MotoCorp
- Managed production output for Hero's EV battery pack division, overseeing daily assembly operations and quality control
- Maintained rigorous quality standards while meeting aggressive production targets for EV battery safety compliance
- Implemented process improvements that streamlined battery assembly line workflow and reduced cycle time
Graduate Engineer Trainee - Projects
Hero MotoCorp
- As a Graduate Engineer at Hero's completely automated Parts fulfillment center, optimized material movement using Robotics such as AMRs and RGVs
- Led initiatives that increased profitability by 23% through automation improvements
- Implemented sampling-based path planning for dynamic obstacle avoidance
Projects
Featured Robotics Projects

Industrial Robotics
Autonomous Forklift AMR System
Deployment and refinement of autonomous forklift AMRs at Tesla, leveraging SLAM, LiDAR, and 3D pallet vision for automated material handling in manufacturing.
Algorithm Development
Theta* Automated Path Planning
Programmed AMR path planning using penalty-optimized Theta* algorithm, reducing routing complexity by 83% for efficient navigation in complex layouts.
AI Safety Systems
VIGIL — AI Pedestrian Safety System
Production-grade AI pedestrian detection system for warehouse forklifts, featuring 7 swappable detection models, real-time React dashboard, gRPC streaming, and Kafka event pipelines.
Reinforcement Learning
RobustWalker — RL Quadruped Locomotion
PPO-based neural network policy for Unitree Go1 quadruped robot, achieving robust blind locomotion on rough terrain using proprioceptive sensing and domain randomization.

AI + Robotics
LLM-Enhanced A* Path Planning
Hybrid path planning system integrating LLM waypoint guidance with classical A* search, achieving significant improvements in node efficiency.
Industrial Automation
Zero-Height Pallet Lifter
Designed and implemented zero-height pallet lifters to optimize material handling at Hero MotoCorp's EV plant, significantly reducing unloading time.
SLAM & Perception
3D Spatial Mapping of Sparse Featured Environments
This project explores using RTAB-Map (Real-Time Appearance-Based Mapping) to create 3D indoor maps for applications like calculating paint/wallpaper requirements.
Sensor Fusion
GPS & IMU Sensor Fusion for Automotive Dead Reckoning
Fusing IMU's split-second reflexes with GPS's steady fixes using Extended Kalman Filtering for reliable automotive navigation.
Mobile Robotics
AMR Fleet & Path Planning
Optimized material movement using AMRs and RGVs, achieving significant efficiency gains through RRT-based path planning and dynamic obstacle avoidance.

Process Engineering
EV Battery Production Optimization
Managed production output and implemented process improvements for the EV battery pack division, ensuring high quality and efficiency.

Industrial Automation
Diode Based Laser Cutter for Leather Applications
Adaptive Three-Axis Gantry Robot Laser Cutter designed for leather manufacturing, featuring dynamic standoff distance control.
Control Systems
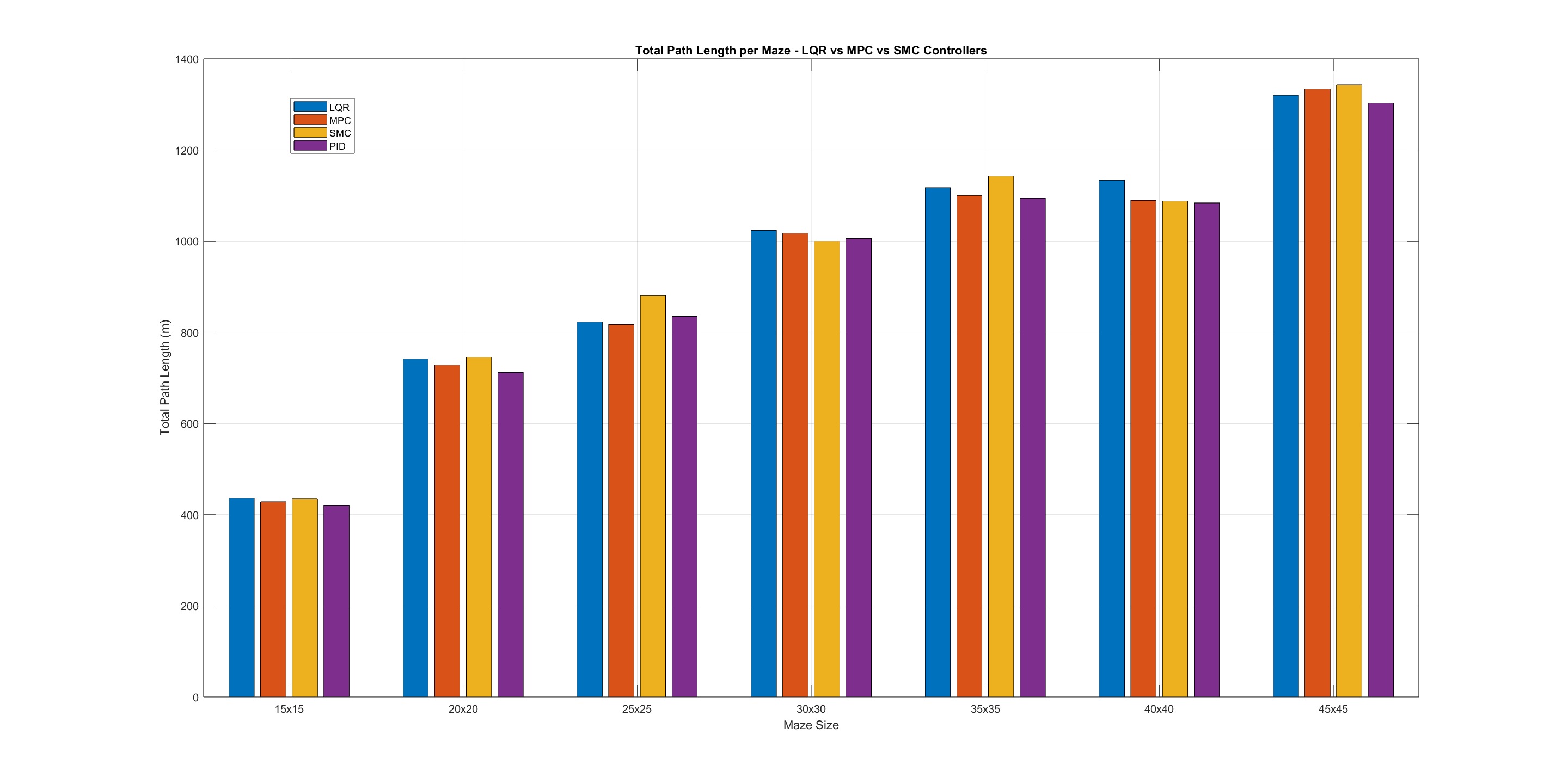
Maze Solving Robot
Developed an autonomous maze-solving robot using flood-fill and PID algorithms, optimizing path length and traversal time.
Aerial Robotics
Nano Swarm Drone
Drone Surveillance System for smart campuses, providing autonomous, real-time monitoring and enhanced security with SWARM capabilities.

Underwater Robotics
Zerkix ROV
Biomimetic Remotely Operated Vehicle (ROV) designed for underwater inspections, inspired by ray fish hydrodynamics.
Skills
Technical Expertise
Personal Skills
Robotics & Autonomy
Programming
Frameworks & Tools
Hardware
Software & DevOps
Manufacturing
Research Publications
Published Research
Peer-reviewed research in robotics, manufacturing automation, and industrial engineering.
Engineering Blog
Engineering Blog
Thoughts on robotics, AI, and the engineering journey — originally shared on LinkedIn.
Contact
Let's Build Something Together
I'm graduating from Northeastern's MS Robotics program in August 2026 and actively interviewing for Robotics Engineer, AMR Systems Engineer, and Manufacturing Automation roles. If you're building robots that work in the real world, let's talk.